As reading week passes and the demo date gets closer, we make more progess towards a functional machine.
General Updates
Reading week meant a short pause in the build, as some of our team members took time to visit family, but we’re still moving towards a fully functional machine.
We have a few important milestones to prepare for in the next few weeks:
- CSA Pre-inspection (by March 3)
- CSA Inspection (the week of March 6)
- Demonstration to our Supervisors (the week of March 6)
Mechanical Updates
This week follows a similar theme to previous weeks: more progress on milling heads, and more progess on dust management.
Milling Heads
The two milling/drilling heads have been installed to the machine, and now all critical mechanical sysystems are officially installed. As previously discussed, these two heads are functionally identical to the first, and so their testing and calibration are expected to go by much faster, using the results from the first head.
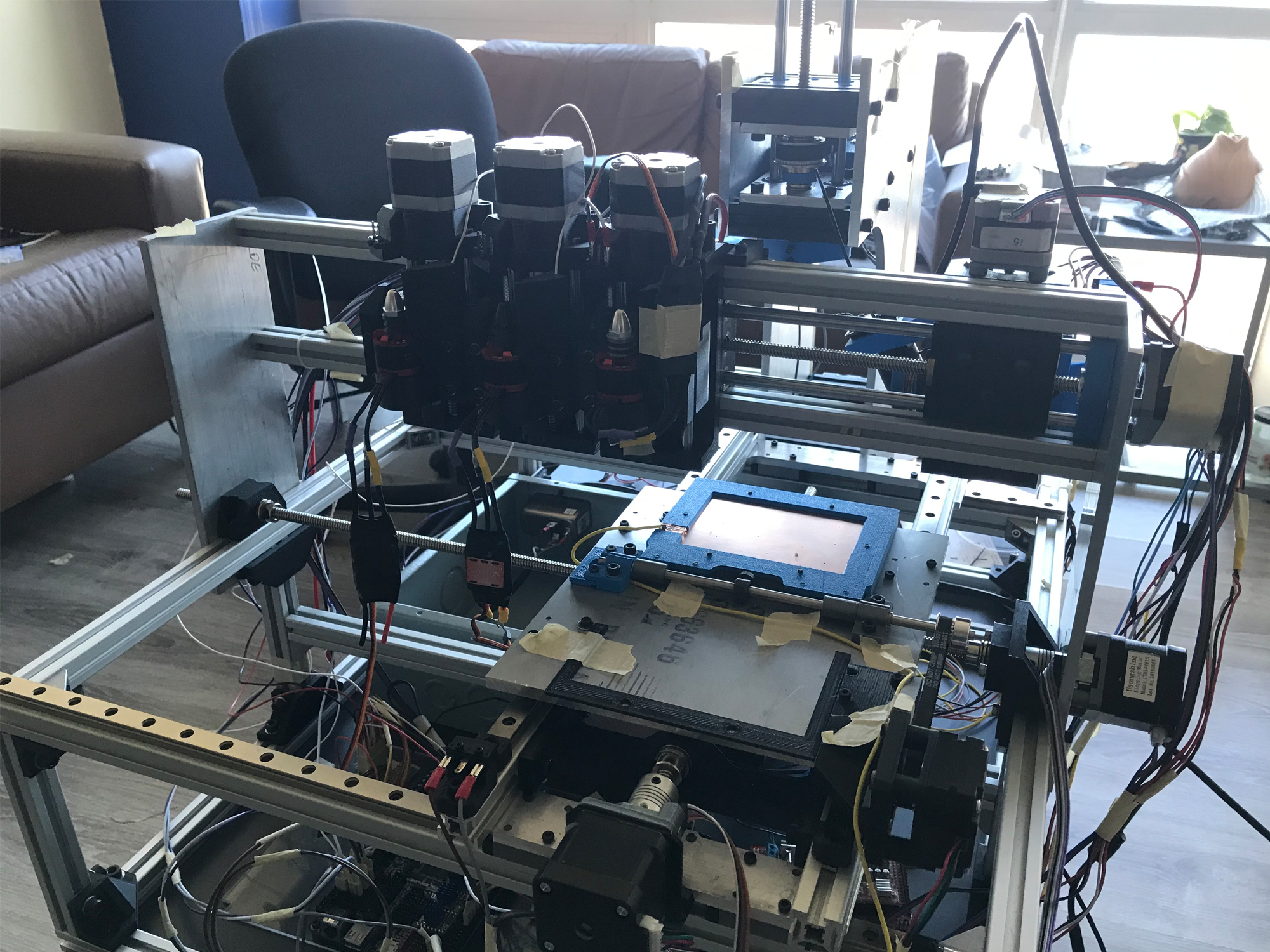
All milling head assemblies installed to the machine.
Dust Management
In previous updates we showcased a custom blower fan to use in our dust collection system; over the last week we’ve prototyped it, iterated on the design to increase suction, and are now in the process of prototyping the rest of the system (primarily a dust separator).

A prototype of our custom blower fan design.
Mechanical Next Steps
The mechanical priority is the same as it’s been for the past few weeks; solving any issues that come up during testing, and focusing on dust management and the enclosure otherwise.
Software/Firmware Updates
Over the last week:
- Computer vision software was tested on the raspberry pi
- Found and fixed an error where the camera could not be opened by the software
- Found and fixed an error where the default camera resolution setting was smaller than on the laptop
Errors and Solutions
Two problems were encountered this week when the software was tested on the raspberry pi. The first problem was that sometimes the camera could not be turned on by the software. The main error message was that the webcam device was busy. The Klipper firmware has a feature to use a webcam so that you can view the machine remotely. The solution to this problem was to disable this feature in Klipper as the webcam could not be used by two programs at once. The second problem was that the default camera resolution on the raspberry pi is 1280x720. On the laptop the default resolution was 1920x1080 so this caused some alignment issues with the cropping of the video as the coordinates on the video frames are different with the new resolution. To solve this issue, the cropping coordinates were found again at the new resolution. Also, the resolution was set to 1280x720 inside the computer vision software so from now on regardless of whether the software is running on the laptop or the machine, they will use the same known resolution.
Software Next Steps
Now that these problems are fixed the actual detection functionality will be tested. The goal of these tests will be to test various lighting conditions and ensure a hole and the wire can always be detected. Since the machine is being developed next to a large window the lighting conditions will be as bright as possible in the middle of the day and as dark as possible at night. By tuning the computer vision software to work under both these extremes we can then be confident that it will be able to handle subtle lighting changes that are expected to appear when presenting and moving this machine to E7 on the day of the symposium.